DirectSD
Глава 13 DirectSD
Непосредственный режим Direct3D

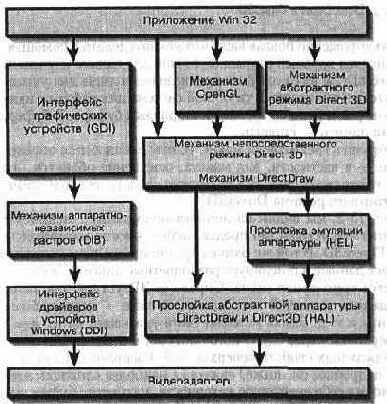
На Рисунок 13-1 компоненты DirectDraw и Direct3D объединены в одной рамке, поскольку все приложения, работающие с Direct3D, всегда так или иначе связаны и с DirectDraw (если поместить их в отдельных рамках, то на диаграмме лишь появятся дополнительные стрелки).
Рисунок. 13-1. Архитектура DirectDraw
/h2>
Непостедственный оежим Direct3D
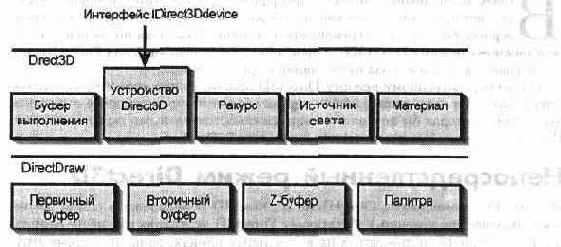
Поскольку DirectDraw и Direct3D все же обладают разными функциями, давайте взглянем на диаграмму, на которой показаны услуги, предоставляемые каждым из этих механизмов. На Рисунок 13-2 перечислены некоторые из возможностей, использованных нами при разработке приложений для непосредственного режима Direct3D.
/b>
Глава 13, Direct3D
Конвейер визуализации
Наиболее интересной частью всего непосредственного режима является конвейер визуализации, который получает описание объектов макета, данные об источниках света, несколько матриц 4х4 и создает по ним итоговую картину, которую мы видим на экране. На Рисунок 13-3 изображена упрощенная схема конвейера визуализации.
/b>
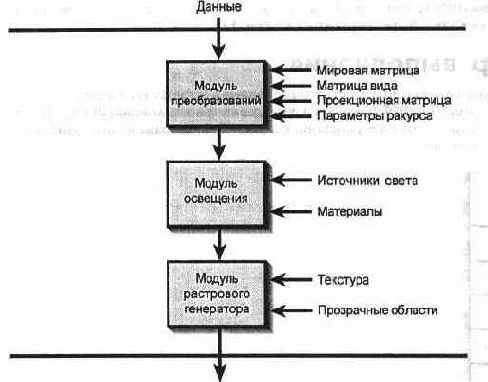
мый буфер выполнения (execute buffer). Затем буфер выполнения пропускается через конвейер. Один и тот же буфер можно многократно пропустить через конвейер; вскоре мы убедимся, что это очень полезно.
Если вы захотите выполнять свои собственные преобразования мировых координат, то можете подключиться к конвейеру на этапе освещения. Если потребуется самостоятельно выполнять преобразования и обсчитывать источники света, подключайтесь к конвейеру на этапе генерации растров (должен напомнить о том, что для самостоятельного выполнения преобразований, обсчета освещения и генерации растров вам следует обратиться к главе 12).
Буфер выполнения
Конвейер визуализации получает исходные данные в буферах выполнения. Обычно такой буфер содержит набор вершин и последовательность команд, указывающих, что нужно сделать с этими вершинами. На Рисунок 13-4 изображен упрощенный вид буфера выполнения.
Рисунок. 13-4. Буфер выполнения
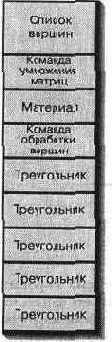
В буфере, изображенном на Рисунок 13-4, содержится список вершин, описывающих одну или несколько фигур в системе координат модели. За списком следует операция матричного умножения, которая может использоваться, например, для поворота макета на несколько градусов. Далее идет материал, а за ним — команда, применяемая к списку вершин (обычно сводящаяся к преобразованию и освещению вершин). Оставшаяся часть списка заполняется командами для рисования отдельных треугольников. Каждый треугольник описывается тремя индексными значениями. По индексам выбирается элемент списка вершин, с которого начина-
/h2>
Глава 13. Direct3D
ется буфер. Нетрудно догадаться, что буфер выполнения большей частью заполнен данными о вершинах и фигурах.
Поскольку в набор команд буфера выполнения также включены команды для рисования отдельных точек и линий, вы можете легко воспользоваться тем же самым набором исходных данных для рисования «проволочной модели» объектов — для этого следует заменить команды рисования треугольников командами рисования линий. Если вы захотите самостоятельно выполнять преобразования, с освещением или без него, вид буфера выполнения почти не изменится. Отличия заключаются лишь в том, что для вершин в списке указывается другой тип, а в буфере отсутствуют матричные операции (или данные о материалах, если вы самостоятельно обсчитываете освещение). На Рисунок 13-5 изображена структура команды буфера выполнения.
Рисунок. 13-S. Структура команды в буфере выполнения

Команда состоит из кода операции, определяющего ее тип, поля размера, задающего общий размер блока данных, и счетчика, который указывает количество аналогичных команд, следующих за данной. Иногда счетчик оказывается чрезвычайно полезным — например, при задании набора треугольников.
Я весьма упрощенно показал, как действует буфер выполнения. Тем не менее вскоре мы увидим его в действии (стр. 315), и вы получите представление о том, как пользоваться им на практике. Если вам хочется получить более подробную информацию, обращайтесь к документации DirectX 2 SDK.
BviteD выполнения
/h2>
Практическое использование непосредственного режима
Из документации DirectX 2 SDK выясняется, что для многих объектов непосредственного режима (например, источников света) определяется не только специальная структура данных, но и логический номер, по которому можно обращаться к объекту, а также СОМ-интерфейс для операций с ним. Это кажется излишеством, но если принять во внимание реализацию объектов в Direct3D, такой подход обретает смысл.
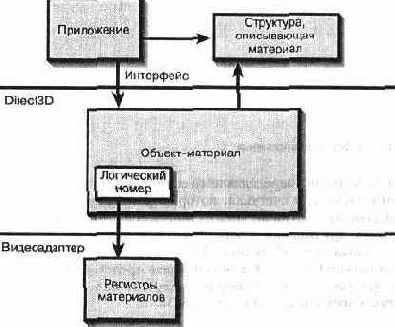
Одна из главных задач Direct3D — обеспечение аппаратного ускорения как можно большего количества операций. В этом благородном деле способны помочь логические номера. Предположим, нам потребовалось задать материал объекта. Мы заполняем структуру данных, определяющую материал, и обращаемся к механизму визуализации с требованием создать соответствующий объект. Механизм визуализации обнаруживает, что наши аппаратные средства обладают специальными возможностями по работе с материалами, и поэтому после создания объекта-материала аппаратный драйвер возвращает логический номер для нового материала. Он понадобится нам для манипуляций с созданным объектом, поскольку последний, вероятно, находится в памяти видеоадаптера и мы не сможем обращаться к нему напрямую. Поскольку все начиналось со структуры данных, расположенной в основном адресном пространстве, желательно пользоваться той же самой структурой и для работы с материалом на аппаратном уровне. СОМ-интерфейс объекта позволяет получить информацию от структуры данных и применить ее к объекту. Кроме того, именно логический номер заносится в буфер выполнения при манипуляциях с материалом, потому что работа с ним может происходить на аппаратном уровне. На Рисунок 13-6 показано, как связаны между собой различные компоненты.
Рисунок. 13-6. Различные компоненты материала 308 Hill1 Глава 13. Direct3D
Необходимость хранения структур данных, интерфейсов и логических номеров для каждого объекта приводит к чрезмерному усложнению программ, поэтому я скрыл все это в классах C++. Классы содержат операторы преобразования типов, возвращающие логический номер, и реализуют ряд полезных функций СОМ-интерфейсов.
Я разработал класс C++ для каждого объекта DirectSD, с которым собирался работать, а также для буфера выполнения. Эти классы не вошли в библиотеку SdPlus, потому что они используются только в примере DSDEval. Вы найдете их в файлах Direct.cpp и Direct.h в каталоге DSDEval. Вряд ли можно считать их законченными классами; они содержат лишь то, что было необходимо для примера.
Класс буфера выполнения
Я постарался сделать класс для работы с буфером выполнения максимально полезным. Поскольку списки вершин и команд в буфере имеют переменную длину, размер буфера трудно определить заранее. Класс выделяет под буфер выполнения область памяти и вносит в нее элементы до тех пор, пока не кончится свободное место — в этот момент он умирает. Вы подумали, что мне следовало бы заново выделить увеличенную область памяти под буфер, не так ли? Вместо этого я сделал размер буфера большим, чем того требует пример, и включил в программу оператор ASSERT, чтобы отследить переполнение буфера. Функция из файла Direct.cpp, добавляющая один байт в буфер выполнения, выглядит следующим образом:
BOOL CExecute::AddByte(BYTE b) {
// Проверить, существует ли указатель на буфер
if (m_Desc.lpData == NULL) ( LockBufferf) ;
}
BYTE* pBuf = m_dw0ffset + (BYTE*)m_Desc.IpData;
*pBuf++ = b;
m_dw0ffset++;
// Убедиться, что в буфере осталось свободное место ASSERT(m_dw0ffset « m_Desc.dwBufferSize);
// Дописать код возврата
*pBuf = D3DOP_EXIT;
return TRUE;
)
Данная функция используется при внесении всех структур данных в буфер выполнения. Вы можете модифицировать ее, чтобы буфер автоматически увеличивался в случае его заполнения, и тогда класс станет значительно более гибким.
Практическое использование непосредственного режима "^^ 309
Несмотря на всю убогость реализации, класс значительно облегчает создание буфера выполнения и работу с ним по сравнению с предназначенными для этого макросами Direct3D.
Матрицы
Нам необходимо определить три матрицы: для мирового преобразования, проекции и вида. Для работы с тремя матрицами непосредственного режима я создал простейший матричный класс CMatrix, напоминающий класс CSdMatrix из библиотеки 3dPlus. Он облегчает создание матриц и обращение с ними, однако при этом необходимо соблюдать некоторую осторожность — я не очень тщательно отнесся к инкапсуляции данных. В сущности, вы можете по своему усмотрению изменить элементы матрицы, а затем вызвать приведенную ниже функцию Update для внесения изменений в настоящий объект-матрицу:
void CMatrix::Update() {
if(m_hMatrix && m_pID3D) {
HRESULT hr = m_pID3D-»SetMatrix(m_hMatrix, this);
ASSERT(SUCCEEDED(hr)) ;
} }
Хотя подобный подход может показаться странным, он достаточно эффективен и позволяет избежать промежуточных обновлений объекта в случае изменения сразу нескольких элементов.
О трех матрицах непосредственного режима стоит рассказать подробнее. Матрица мировых координат вначале представляет собой единичную матрицу и, по всей вероятности, таковой и останется, если ваш макет будет неподвижен. Перемещение макета может осуществляться путем изменения мировой матрицы — именно это и происходит в примере D3DEval, как мы вскоре убедимся (стр. 320). Исходная мировая матрица выглядит следующим образом:
"1000" 0100 0010 0001
Матрица вида контролирует положение камеры и в исходном состоянии обычно совпадает с матрицей переноса вдоль оси z. В своем примере я постарался воспроизвести то, что мы делали в предыдущих примерах. Камера сдвигается на небольшое расстояние вдоль оси z (в область отрицательных значений). Вот как выглядит матрица из примера, устанавливающая камеру в точке О, О, -2:
/b> 1У Глава 13. Direct3D
"1000 0100 0010 0021
Проекционная матрица оказывается значительно интереснее. Чтобы добавить в изображение перспективу и преобразовать пространственные координаты в двумерную систему пикселей окна, необходимо воспользоваться матрицей, которая пересчитывает координаты х и у, деля их на координату z. Проекционная матрица также задает масштабный коэффициент — он определяет, сколько экранных пикселей занимает конкретное расстояние в единицах модели при его проецировании на экран. Проекционная матрица из нашего примера выглядит следующим образом:
"20 00" 02 00 00 11 0 0 - 1 0_
Если вам это покажется совершенно очевидным, я снимаю перед вами шляпу. Чтобы посмотреть, как все происходит, возьмем вектор воображаемой точки (х, у, z, w) и умножим его на матрицу. Результат будет таким:
х' = 2х
У' = 2у
Z' = 2 -W W' = Z
Нормализуем результат, разделив его на z:
х' = 2х / z
у' = 2у / z
z' = (z-w) / z
w' = 1
Если предположить, что исходная точка была нормализована (w = 1), то эти выражения можно еще немного упростить:
х' = 2х / z у' = 2у / z z' = (z-1) / z
w' = 1
Потрясающе, Найджел! Теперь все стало гораздо понятнее. Допустим, смысл происходящего не до конца очевиден, но становится ясно, что координаты х и у делятся на z — это дает нам необходимое преобразование перспективы. Кроме того, видно, что х и у умножаются на коэффициент 2, что изначально входило в мои намерения (хотя я и не упоминал об этом).
Практическое использование непосредственного режима
/b>
Если вам захочется воспользоваться какой-нибудь другой проекцией, обращайтесь за помощью к справочным пособиям.
Приложение D3DEval
Пример D3DEval показывает, как вывести простейшую трехмерную фигуру в оконном или полноэкранном режиме с помощью монохромного или RGB-драйвера (на цветной вкладке показан внешний вид приложения D3DEval). Вы можете выбрать размер окна или (в полноэкранном режиме) разрешение экрана. Подготовительная часть этого приложения очень похожа на DDEval из главы 12, поэтому я опишу лишь те фрагменты кода, которые относятся к Direct3D.
Чтобы как можно полнее исследовать непосредственный режим Direct3D при минимальном объеме кода, я решил воспользоваться единственным объектом в макете с одним источником освещения (не считая рассеянного света), одним материалом для фона и одним материалом для объекта. С каждой новой итерацией к мировой матрице применяется преобразование поворота, чтобы макет вращался. Как и в приложении DDEval, при воспроизведении макета на экране отображается количество кадров в секунду.
В программе присутствует несколько директив #if, которые позволяют задать различные параметры работы — например, рисование проволочного каркаса вместо твердого тела.
Наш объект состоит из четырех вершин; это наименьшее количество вершин, образующих объемное тело. Задается всего один материал, так что объект имеет один цвет. Фон тоже выбран одноцветным. Довольно интересно проследить за цветовыми ограничениями, поскольку в системе с 256 цветами можно просмотреть содержимое системной палитры (с помощью утилиты Syspal из каталога Tools на диске CD-ROM) и увидеть, какие из ее элементов заняты.
Код программы состоит из двух основных фрагментов. Первый из них настраивает механизм визуализации, ракурс, освещение и фон. Второй фрагмент воспроизводит макет на экране. Поскольку оба фрагмента получились достаточно длинными, я разбил их на небольшие этапы и последовательно рассмотрел каждый из них. В программе используются классы из 4)айла Direct.cpp. Большая часть функций классов выглядит очень просто, поэтому я не стану рассматривать функции классов и сразу перейду к общей логике программы.
Подготовка
Начнем с краткого изучения фрагмента, в котором создаются окно и поверхности DirectDraw, а также выбирается оконный или полноэкранный режим работы:
BOOL CTestWnd::Create(TESTINFO* pti) {
// Создать объект DirectDraw m_pDD = new CDirectDraw;
BOOL b = m_pDD-»Create () ;
ASSERT(b) ;
/b> вГ Глава 13. Direct3D
// Зарегистрировать класс для тестового окна
CString strClass =
AfxRegisterWndClass(CS_HREDRAW ¦ CS_VREDRAW,
::LoadCursor(NULL, IDC_ARROW), (HBRUSH)::GetStockObject(GRAY_BRUSH)) ;
// Определить стиль и размер окна DWORD dwStyle = WS_VISIBLE I WS_POPUP;
RECT re;
if (m_pTI-»bFullScreen) {
re.top =» 0;
re.left = 0;
re.right =» ::GetSystemMetrics(SM_CXSCREEN);
re.bottom = ::GetSystemMetrics(SM_CYSCREEN);
} else { // Оконный режим
dwStyle ¦= WS_CAPTION ¦ WS_SYSMENU;
re.top = 50;
re.left = 50;
re. bottom = re. top + m_pTI-»iHeight;
re. right = re. left + m_pTI-»iWidth;
// Настроить окно, чтобы его клиентная область
// имела требуемые размеры
::AdjustWindowRect(&rc, dwStyle, FALSE);
»
// Создать окно.
// В программе нет обработчика сообщения WM CREATE,
// поэтому ничего особенного здесь не происходит. /
if (!CreateEx(0,
strClass,
"DirectSD Window",
dwStyle,
re.left, re.top,
re.right — re.left, re.bottom — re.top,
m_pTI-»pParent-»GetSafeHwnd () ,
NULL)) ( return FALSE;
}
// Обеспечить отображение окна на экране UpdateWindowf) ;
// Задать экранный режим объекта DirectDraw, // создать первичный и вторичный буфера и // при необходимости — палитру if (m_pTI-»bFullScreen) {
b = m_pDD-»SetFullScreenMode (GetSafeHwnd () , m_pTI-»iWidth,
nrMJnnwauiJQ n'mCtf-al ^vH^ ^14
m_pTI-»iHeight,
m pTI-»iBpp) ;
} else { b = m_pDD-»SetWindowedMode (GetSafeHwndO ,
m_pTI-»iWidth,
m_pTI-»iHeight) ;
} ASSERT(b) ;
Практически это тот же самый код, что и в примере DDEval. Он создает первичный и вторичный буфера и при необходимости — палитру. Теперь давайте рассмотрим оставшуюся часть подготовительного кода.
// Создать объект Direct3D на основе поверхностей
DirectDraw m_pD3D = new CDirect3D();
b = m_ D3D-»Create (m_pDD) ;
ASSERT(0);
/ / Задать режим освещения. При этом также назначается // аппаратный или программный драйвер и создается Z-буфер if (pti-»iLightMode ==1) (
b = m_pD3D-»SetMode(D3DCOLOR_MONO) ;
} else {
b = m_pD3D-»SetMode(D3DCOLOR_RGB) ;
} ASSERT(b) ;
// Получить указатели на интерфейсы механизма D3D
// и устройства
m_pIEngine = m pD3D-»GetD3DEngine () ;
ASSERT(m_pI Engine);
m_pIDevice = m_pD3D-»GetD3DDevice () ;
ASSERT(m_pIDevice) ;
Объект Direct3D создается на основе буферов DirectDraw. По выбранному режиму освещения определяется нужный модуль освещения. Наконец, мы получаем указатели на интерфейсы выбранного механизма Direct3D и устройства. Эти интерфейсы применяются для создания всех остальных объектов и управления
ими.
// Создать ракурс
HRESULT hr = m_pIEngine-»CreateViewport(&m_pIViewport, NULL) ;
ASSERT(SUCCEEDED(hr));
ASSERT(m_pIViewport) ;
// Присоединить ракурс к устройству 314 йЦГ Глава 13. Direct3D
hr = m_pIDevice-»AddViewport (m_pIViewport) ;
ASSERT(SUCCEEDED(hr));
Созданный объект ракурса закрепляется за устройством. Последнее может содержать несколько ракурсов, но в нашей программе используется только один.
// Задать конфигурацию ракурса.
// Примечание: Некоторые действия связанные с выбором
// масштабных коэффициентов и т. -д.,
// будут повторно выполнены
// позднее, при настройке проекционной матрицы.
D3DVIEWPORT vd;
memsetl&vd, 0, sizeof(vd));
vd.dwSize = sizeof(vd); // Размер структуры
// Определить область ракурса на устройстве vd.dwX =0; // Левая сторона vd.dwY = 0; // Верх
vd.dwWidth = m_pTI-»iWidth; // Ширина vd.dwHeight = m_pTI-»iHeight; // Высота
// Задать масштаб, чтобы ракурс имел размер 2х2
// единицы модели
vd.dvScaleX = D3DVAL (m_pTI-»iWidth) / D3DVAL(2.0);
vd.dvScaleY = D3DVAL (m_pTI-»iHeight) / D3DVAL(2.0);
// Установить максимальные значения координат х и у
// равными 1,
// чтобы начало координат находилось в центре,
// а координаты х и у
// принимали значения из интервала от -1 до +1,
//то есть, от -интервал/2 до + интервал/2
vd.dvMaxX = D3 DVAL(1.0);
vd.dvMaxY = D3DVAL(1.0);
// Задать интервал значений по оси z vd.dvMinZ = D3DVAL(-5.0);
vd.dvMaxZ = D3DVAL(100.О);
// Применить параметры к ракурсу hr = m_pIViewport-»SetViewport (&vd) ;
ASSERT(SUCCEEDED(hr)) ;
Мы заполняем структуру D3DVIEWPORT, чтобы задать исходное состояние ракурса — используемую им физическую область устройства и значения масштабных коэффициентов для осей х и у. Я выбрал область размером 2х2 единицы и установил начало координат в центре, чтобы значения координат х и у лежали в интервале от -1 до +1. Кроме того, следует задать интервал координат по оси z — это важно при определении видимых объектов. Объекты, находящиеся за
Приложение DSDEval '^ЦЦ 315
максимальным или перед минимальным значением z, не будут воспроизводиться на экране. Подходите к делу разумно — старайтесь подобрать интервал, который как можно точнее ограничивает ваш макет, потому что при этом удается достичь максимальной точности величин из Z-буфера и избежать искажений для объектов, расположенных вблизи от камеры.
После заполнения структуры данных происходит обновление параметров ракурса.
// Задать параметры визуализации.
// Создать буфер выполнения.
CExecute exi (m_pIDevice, m_pIViewport);
// Задать режимы закраски и заполнения. По ним Direct3D // выберет драйверы, которыми он будет пользоваться. // Значения по умолчанию не определены. exi.AddRenderState(D3DRENDERSTATE_FILLMODE,
D3DFILLJ30LID) ;
exi.AddRenderState(D3DRENDERSTATE_SHADEMODE,
D3DSHADE_GOURAUD) ;
exi.AddRenderState(D3DRENDERSTATE_DITHERENABLE, 1) ;
// Разрешить использование Z-буфера exi.AddRenderState(D3DRENDERSTATE_ZENABLE, 1) ;
Сначала мы создаем буфер выполнения, в который будут заноситься последующие команды.
Далее необходимо определить, как будет воспроизводиться макет. Я выбрал сплошное заполнение с закраской Гуро и разрешил смешение цветов в RGB-режиме. Существует множество других опций, которые также можно изменять, однако именно выбранные мной параметры более всего влияют на внешний облик макета. Полный перечень установок визуализации можно найти в документации DirectX 2 SDK. Кроме того, я разрешил использование созданного ранее Z-буфера.
// Создать матрицу мирового преобразования (единичную) m_mWorld.Create(m_pIDevice) ;
exl.AddState(D3DTRANSFORMSTATE_WORLD, m_mWorld) ;
// Создать проекционную матрицу.
// Примечание: Это было сделано ранее, при настройке
// параметров ракурса, однако при выборе режимов
// заполнения
//и закраски данные ракурса были сброшены.
m_mProjection.Create(m_pIDevice);
m_mProjection._ll = D3DVAL(2);
m_mProjection._22 = D3DVAL(2);
m_mProjection._34 = D3DVAL(1);
m_mProjection._43 = D3DVAL(-1);
m_mProjection._44 = D3DVAL(0);
m_mProj ection.Update();
/b> ЩЦ' Глава 13. Direct3D
exI.AddState(D3DTRANSFORMSTATE_PROJECTION, m mProjection);
// Задать матрицу вида (положение камеры) m mView.Create(m_pIDevice) ;
m_mView._43 = D3DVAL(2); // Camera Z = -2;
m_mView.Update() ;
exi.AddState(D3DTRANSFORMSTATE_VIEW, m_mView) ;
Приведенный выше фрагмент определяет матрицы (мировую, проекционную и матрицу вида). В начале матрицы являются единичными, благодаря чему в дальнейшем можно заполнять лишь те элементы матриц, которые не совпадают с элементами единичной матрицы. Имена переменных класса, _43 и т. д., взяты из структуры Direct3D под названием D3DMATRIX, для которой класс CMatrix является производным.
// Добавить команду для задания уровня рассеянного освещения exI.AddAmbLight(RGB_MAKE(64, 64, 64));
Интенсивность рассеянного света задается ниже среднего. Обратите внимание на то, что здесь RGB-составляющие лежат в интервале от 0 до 255. В других случаях мы пользуемся цветовыми значениями из интервала от 0.0 до 1.0 — следите за этим.
// Выполнить команды из списка b = exi.Execute();
ASSERT(b) ;
Буфер выполнения передается на конвейер визуализации, чтобы обеспечить установку выбранных нами параметров. Данная функция работает по принципу «пан или пропал» — если она заканчивается неудачно, то компьютер обычно «виснет», так что постарайтесь правильно задать параметры команд перед тем, как выполнять Execute для буфера.
// Присоединить источник света к ракурсу m_Lightl.Create(m_pIEngine) ;
m_Lightl.SetColor(0.8, 0.8, 0.8);
m_Lightl.SetType(D3DLIGHT_DIRECTIONAL) ;
m Lightl.SetDirection(1, -1, 1) ;
m_Light1.Update () ;
hr = m_pIViewport-»AddLight (m_Lightl) ;
ASSERT(SUCCEEDED(hr)) ;
В модуль освещения включается направленный источник света. Обратите внимание на функцию Update, которая обновляет состояние физического объекта при помощи параметров, заданных при вызовах предыдущих функций. Источник света испускает белый цвет (точнее, серый) и направлен вниз и внутрь макета, если смотреть из левого верхнего угла.
ГЬиложение DSDEval 'tH 317
// Создать материал для фона.
// Примечание: количество оттенков должно быть равно 1, // иначе монохромный драйвер присвоит материалу черный цвет.
// Разумеется, для фонового цвета вполне достаточно одного
// оттенка, так что это лишь позволяет нам избежать // напрасного расходования элементов палитры. m_matBkgnd.Create(m_pIEngine, -m_pIDevice);
m_matBkgnd.SetColor(0.0, 0.0, 0.5); // Темно-синий m matBkgnd.SetShades (1) ; // Только один оттенок hr = m_pIViewport-»SetBackground(m_matBkgnd) ;
ASSERT)SUCCEEDED(hr));
f
Завершающим шагом является выбор материала фона. Если пропустить этот этап, макет будет выводиться на черном фоне. Материал фона должен иметь всего один цветовой оттенок. Если указать более одного оттенка (или воспользоваться принятым в классе значением по умолчанию, равным 16), то монохромный драйвер сделает фон черным. Поскольку освещение не влияет на цвет фона, одного оттенка вполне достаточно, и выбор большего количества лишь приведет к напрасному расходованию элементов палитры.
Теперь у нас есть макет с фоном, освещением, заданным положением камеры и проекционной пирамидой. Не хватает лишь объекта.
Выполнение тестов
Пример D3DEval включает два теста. Первый из них пользуется набором неосвещенных вершин и конвейером визуализации для выполнения преобразований и расчета освещения. Второй тест берет предварительно преобразованные и освещенные вершины и использует только растровый генератор. Мы подробно рассмотрим код первого теста, поскольку такая ситуация часто встречается на практике, а затем в общих чертах посмотрим, какие же отличия возникают, если пропустить этапы обсчета преобразования и освещения в конвейере визуализации.
В каждой итерации теста мы подготавливаем буфер выполнения и многократно выполняем его. Тест запускается таймером, поэтому весь процесс выглядит непрерывным. Давайте начнем с подготовительного кода и рассмотрим его шаг за шагом.
void CTestHnd::Testl() (
// Получить указатели на первичный и вторичный буфера CDDSurface* рВВ = m_pDD-»GetBackBuffer () ;
ASSERT(pBB) ;
CDDSurface* pFB = m_pDD-»GetFrontBuffer();
ASSERT(pFB) ;
/b> ЩУ Глава 13. DirectSD
// Получить прямоугольник, описывающий первичный буфер RECT rcFront;
if (m_pTI-»bFullScreen) {
pFB-»GetRect (rcFront) ;
} else f
GetClientRect(&rcFront) ;
ClientToScreen(&rcFront) ;
)
// Получить прямоугольник, описывающий вторичный буфер RECT rcBack;
pBB-»GetRect (rcBack) ;
Мы получаем указатели на первичный и вторичный буфера и их размер. Данный фрагмент совпадает с соответствующим местом из примера DDEval.
// Создать список вершин фигуры (некое подобие пирамиды) D3DVERTEX vShape [] = {
{ // xyz вершин
D3DVAL(-0.3), D3DVAL(-0.1), D3DVAL( 0.1),
// xyz нормалей
D3DVAL(-1.0), D3DVAL(-1.0), D3DVAL(-1.0),
// uv текстуры
D3DVAL( 0.0), D3DVAL( 0.0)
}, { D3DVAL( 0.3), D3DVAL(-0.1), D3DVAL( 0.2),
D3DVAL( 1.0), D3DVAL(-1.0), D3DVAL(-1.0),
D3DVAL( 0.0), D3DVAL( 0.0) }, { D3DVAL( 0.0), D3DVAL(-0.3), D3DVAL( 0.3),
D3DVAL( 0.0), D3DVAL(-1.0), D3DVAL( 1.0),
D3DVAL( 0.0), D3DVAL( 0.0) }, { D3DVAL( O.I), D3DVAL( 0.4), D3DVAL( 0.3),
D3DVAL( 0.0), D3DVAL( 1.0), D3DVAL( 0.0),
D3DVAL( 0.0), D3DVAL( 0.0) } };
int nVerts = sizeof(vShape) / sizeof(D3DVERTEX);
Для нашего объекта создается список вершин. Объект содержит четыре вершины, для каждой из которых задается вектор нормали. Он используется в модуле освещения и при наложении покрытий (не рассматриваемых в данном примере).
// Задать материал фигуры CMaterial mShape;
mShape.Create(m_pIEngine, m_pIDevice) ;
mShape.SetColor(0.0, 1.0, 0.0); // Светло-зеленый
Приложение DSDEval '''Щ:. 319
Не забывайте о том, что описание материала состоит из структуры данных в адресном пространстве приложения, а также из внешнего объекта, представленного логическим номером.
// Создать буфер выполнения CExecute ex (m_pIDevice, ni_pIViewport) ;
// Добавить в буфер данные о вершинах ex.AddVertices(vShape, nVerts)';
Моя реализация класса для буфера выполнения (CExecute) требует, чтобы заполнение буфера начиналось с вершин.
// Создать матрицу для мирового преобразования поворота CMatrix mRot(m_pIDevice);
double ry = 1; // Градусы вокруг оси у double siny = sinfry * D2R);
double cosy = cos(ry * D2R);
mRot._ll = D3DVAL(cosy);
mRot._13 = D3DVAL(-siny) ;
mRot._31 = D3DVAL(siny);
mRot._33 = D3DVAL(cosy);
mRot.Update() ;
// Команда умножения мировой матрицы
//на матрицу поворота
ex.AddMatMul(m mWorld, m mWorld, mRot);
Матрица включается в буфер выполнения как часть команды, умножающей мировую матрицу на заданную. Результат присваивается мировой матрице. После выполнения этой команды макет поворачивается на один градус вокруг оси у.
// Добавить описание материала в буфер выполнения ex.AddMaterial(mShape) ;
// Добавить команду обработки вершин, чтобы каждая
//из них
// была преобразована и освещена
ex.AddProcess(nVerts, О,
D3DPROCESSVERTICES_TRANSFORMLIGHT¦ D3DPROCESSVERTICES_UPDATEEXTENTS) ;
Следует отметить, что приведенная выше команда преобразования добавлена в буфер после обновления мировой матрицы, так что поворот мировой матрицы учитывается в нашем преобразовании.
// Добавляем в буфер команды рисования фигур ex.AddTriangle (0, 3, 1) ;
ex.AddTriangle(1, 3, 2);
/b> irf? Глава 13. Direct3D
ex.AddTriangle(2, 3, 0);
ex.AddTriangle(0, 1, 2);
Треугольники должны перечисляться с обходом вершин по часовой стрелке, иначе они будут неверно воспроизведены на экране. Параметры функции AddTriangle представляют собой индексы в списке вершин.
На этом подготовительная часть завершается. Далее мы входим в цикл, который многократно воспроизводит макет во вторичном буфере, вычисляет скорость вывода и переключает буфера, чтобы результат появился на экране:
DWORD dwStart = timeGetTime();
int nFrames = 360;
for (int iFrame = 0; iFrame « nFrames; iFrame++) (
DWORD dwNow = timeGetTime();
double fps;
if (dwNow == dwStart) {
fps = 0;
} else {
fps = iFrame * 1000.0 /
(double)(dwNow - dwStart) ;
)
// Очистить ракурс (присвоить текущий фоновый // материал) D3DRECT г;
r.xl = 0;
r.yl = 0; // Левый верхний угол r.x2 = m_pTI-»iWidth;
r.y2 = m_pTI-»iHeight; // Правый нижний угол hr = m_pIViewport-»Clear(l, &r, D3DCLEAR_TARGET ¦ D3DCLEAR_ZBUFFER) ;
ASSERT(SUCCEEDED(hr));
#if 1 // Заменить на 0, чтобы убрать с экрана // скорость вывода.
// Отобразить строку со скоростью вывода
// во вторичном буфере.
char buf[64] ;
sprintf(buf, "Frame %2d (%3.1f fps)", iFrame, fps) ;
CDC* pdc = pBB-»GetDC() ;
ASSERT(pdc) ;
pdc-»DrawText (buf, -1, SrcBack, DT_CENTER ¦ DT_BOTTOM I DT_SINGLELINE) ;
pBB-»ReleaseDC(pdc) ;
#endif
// Выполнить буфер BOOL b = ex.Execute();
ГЬиложение DSDEval '!№ 321
ASSERT(b) ;
// Переключить буфера
if (m_pTI-»bFullScreen) {
pFB-»Flip () ;
} else {
pFB-»Blt (SrcFront, pBB, SrcBack);
}
\
Если не считать работы с буфером выполнения, данный фрагмент совпадает с примером DDEval.
Расчет преобразований и освещения
Если вы будете самостоятельно выполнять все вычисления для преобразований и освещения, программа значительно упрощается. Разумеется, главное — общий объем кода, который вам придется написать, так что вы вовсе не обязательно окажетесь в выигрыше!
Для растровых генераторов монохромного и RGB- режимов вам придется написать несколько отличающийся код. Растровый генератор RGB-режима осуществляет интерполяцию отдельных RGB-составляющих; генератор монохромного режима интерполирует только оттенки одного цвета, интенсивность которого изменяется от черного до белого с несколькими промежуточными значениями. Если вы пользуетесь растровым генератором RGB-режима, цвета вершин указываются непосредственно в виде RGB-троек, при этом допускаются любые цветовые величины. Для нашего теста я сделал одну вершину красной, другую — зеленой, а третью — синей. Тест показывает, каким образом растровый генератор RGB-режима производит плавные переходы между цветами. Определение вершин для растрового генератора RGB-режима выглядит следующим образом:
void CTestWnd::Test2RGB() {
D3DTLVERTEX vShape [] = { { // x, у, z, 1/w
D3DVAL(10), D3DVAL(10), D3DVAL(2), D3DVAL(1),
// Цвет объекта и зеркальный цвет
RGBA_MAKE(255, О, О, 255),
RGBA_MAKE(255, 255, 255, 255),
// u, v текстуры
D3DVAL(0), D3DVAL(0) }, { D3DVAL(m_pTI-»iWidth - 10), D3DVAL ( 10),
D3DVAL(2), D3DVAL(1),
RGBA_MAKE(0, 0, 255, 255),
RGBA_MAKE(255, 255, 255, 255),
D3DVAL(0), D3DVAL(0)
/b> йЙ? Глава 13. DirectSD
},
{ D3DVAL( 10), D3DVAL(m_pTI-»iHeight - 10), D3DVAL(2), D3DVAL(1), RGBA_MAKE(0, 255, 0, 255), RGBA_MAKE(255, 255, 255, 255), D3DVAL(0), D3DVAL(0) } };
int nVerts = sizeof(vShape) / si'2eof (D3DTLVERTEX) ;
Описание каждой вершины состоит их экранных координат, выраженных в виде х, у, z и 1/w, за которыми следует простой и зеркальный цвета вершины, а затем — параметры и и v для текстуры, которая в данном примере не используется.
Подготовка буфера выполнения выглядит чрезвычайно просто:
// Создать буфер выполнения CExecute ex (m_pIDevice, m_pIViewport) ;
// Добавить данные о вершинах в буфер ex.AddVertices(vShape, nVerts);
// Добавить команды для вершин, чтобы каждая //из них была преобразована и освещена ex.AddProcess(nVerts, О, D3DPROCESSVERTICES_COPY I D3DPROCESSVERTICES_UPDATEEXTENTS);
// Добавить команды для рисования фигуры ex.AddTriangle(О, 1, 2);
Я не привожу копию экрана, потому что оттенков серого недостаточно для передачи хорошей картинки. Вам придется самостоятельно запустить D3DEval и посмотреть, как выглядит окно приложения. Оставшаяся часть кода совпадает с примером Test1, начинающимся на стр. 318.
При использовании растрового генератора монохромного режима цвет грани задается с помощью материала:
void CTestWnd::Test2MONO() {
CMaterial mShape;
mShape.Create(m_pIEngine, m_pIDevice) ;
mShape.SetColorf0.0, 1.0, 0.0); // Светло-зеленый
Теперь можно описать вершины. Их цвета задаются с использованием только синей составляющей цветовой структуры, ее значение определяет интенсивность оттенка цвета материала. Я постарался подобрать вершины так, чтобы добиться наибольшего разнообразия:
Приложение D3DEval ^И 323
D3DTLVERTEX vShape [] = { { // x, у, z, 1/w
D3DVAL(10), D3DVAL(10), D3DVAL(2), D3DVAL(1), // Цвет объекта и зеркальный цвет
RGBA_MAKE(0, 0, 64, 0), RGBA_MAKE(0, 0, 64, 0), // u, v текстуры D3DVAL(0), D3DVAL(0)
),
( D3DVAL(m_pTI-»iWidth - 10) , D3DVAL( 10), D3DVAL(2), D3DVAL(1),
RGBA_MAKE(0, 0, 255, 0), RGBA_MAKE(0, 0, 255, 0), D3DVAL(0), D3DVAL(0)
},
( D3DVAL( 10), D3DVAL(m_pTI-»iHeight - 10),
D3DVAL(2), D3DVAL(1),
RGBA_MAKE(0, 0, 0, 0), RGBA_MAKE(0, 0, 0, 0),
D3DVAL(0), D3DVAL(0) } i ;
Перед обработкой вершин необходимо внести в буфер выполнения описание материала:
// Создать буфер выполнения CExecute ex (m_pIDevice, m_pIViewport) ;
// Добавить в буфер данные о вершинах ex.AddVertices(vShape, nVerts);
// Добавить описание материала в буфер выполнения ex.AddMaterial(mShape) ;
// Добавить команду обработки вершин, чтобы каждая // из них
// была преобразована и освещена
ex.AddProcess(nVerts, О, D3DPROCESSVERTICES_COPY¦ D3DPROCESSVERTICES_UPDATEEXTENTS) ;
Вся оставшаяся часть кода совпадает с тестом для RGB-режима. Как видите, с растровым генератором RGB-режима работать очень просто. Для монохромного режима требуется несколько больше усилии, потому что в нем считается, что каждая грань имеет всего один цвет. Для получения нормальной скорости работы необходимо сгруппировать в бу4)ере выполнения все грани одного цвета.
/b> НУ Глава 13. DirectSD
Чего не хватает?
Краткий обзор непосредственного режима Direct3D лишь в общих чертах показывает, как он работает и как пользоваться буферами выполнения. Я пропустил множество интересных возможностей и не затронул важные вещи (например, работу с текстурами). Как было сказано в начале главы, DirectSD — обширная тема. Тем не менее если вы заинтересовались ей, то моя программа окажется хорошим подспорьем для собственных экспериментов.
Наверняка вы успели заметить, что страниц справа почти не осталось — перед вами последняя глава книги. Возможно, вы думаете, что она просто не имеет права быть последней — мы ничего не узнали о том, как создаются многопользовательские виртуальные миры в Internet, как вывести три проекции вашего дома в одном окне, как нарисовать руку робота, состоящую из нескольких частей, и многое другое. Если вы прочитали всю книгу и просмотрели документацию DirectX 2 SDK, то вы вполне готовы к самостоятельному изучению. Я уже не должен вам помогать, потому что вы знаете ничуть не меньше меня.
Дамы и господа, вечер продолжается!